การสตาร์ทวงจรมอเตอร์คอมมิวเตเตอร์อย่างราบรื่น ชุดซอฟต์สตาร์ท: ข้อมูลทั่วไป เคล็ดลับในการเลือก และคุณสมบัติการใช้งาน คำแนะนำในการเชื่อมต่อและการตั้งค่า! วิดีโอ: การสตาร์ทแบบนุ่มนวล การปรับ และการป้องกันตัวสับเปลี่ยน เครื่องยนต์
โซลิดสเตตซอฟต์สตาร์ทเตอร์ (SSRV) ได้รับการออกแบบมาเพื่อลดผลเสียหายจากกระแสไฟกระชากที่ทำให้เกิดความเครียดทางกลในอุปกรณ์และส่วนประกอบของระบบ ที่บริษัทเอบีบี จุดเน้นหลักคือการขยายฟังก์ชั่นของสตาร์ทเตอร์แบบ "อ่อน" ซึ่งสามารถใช้เป็นอุปกรณ์ป้องกันการปิดมอเตอร์ได้ การทำงานของสตาร์ตเตอร์นั้นขึ้นอยู่กับการตรวจสอบกระแสของมอเตอร์ แรงดันไฟฟ้า และอุณหภูมิ แนวทางใหม่ในการแก้ปัญหาคือการเพิ่มแรงบิดอย่างราบรื่น แทนที่จะเพิ่มแรงดันไฟฟ้าบนมอเตอร์ ชุดซอฟต์สตาร์ทจะคำนวณกำลังสเตเตอร์จริง การสูญเสียของมอเตอร์ ฯลฯ เป็นผลให้กำลังจริงถูกถ่ายโอนไปยังโรเตอร์ สิ่งสำคัญคือแรงบิดของมอเตอร์จะไม่ขึ้นอยู่กับแรงดันไฟฟ้าที่จ่ายให้กับมอเตอร์โดยตรงหรือขึ้นอยู่กับคุณลักษณะทางกลอีกต่อไป แรงบิดที่เพิ่มขึ้นเกิดขึ้นตามกำหนดเวลาการเร่งความเร็ว สตาร์ทเตอร์ "อ่อน" แรงดันต่ำจาก Eaton (S752 วงจรสำหรับ TS106-10 SB01 และ S811) ใช้แรงดันไฟฟ้าที่มีการมอดูเลตความกว้างพัลส์ (PWM) ด้วยแอมพลิจูด 24 V เพื่อควบคุมการพันของคอนแทคเตอร์ ขณะเดียวกัน ในสภาวะคงที่อุปกรณ์จะกินไฟเพียง 5 วัตต์ อุปกรณ์จัดการมอเตอร์ Danfoss Ci-tronic ครอบคลุมช่วงสูงสุด 20 kW (ขึ้นอยู่กับ แรงดันไฟฟ้าขาเข้า- โมดูลซอฟต์สตาร์ทเตอร์ที่เล็กที่สุด MCI-3 มีความกว้างเพียง 22.5 มม. โมดูล MCI-15 ได้รับการออกแบบให้ทำงานกับมอเตอร์ที่มีกำลังสูงถึง 7.5 kW ที่แรงดันไฟฟ้า 480 V ลักษณะสำคัญของสตาร์ทเตอร์ SSRV คือการหยุดมอเตอร์อย่างราบรื่น ซอฟต์สตาร์ทเตอร์ซีรีส์ PST ของ ABB มี HMI ข้อความธรรมดาเพื่อให้ตั้งค่าซอฟต์สต็อปสำหรับปั๊มแรงเหวี่ยง เครื่องบด เครื่องกวน และอื่นๆ ที่คล้ายกันได้อย่างง่ายดาย อุปกรณ์จะตรวจสอบแรงบิดของเครื่องยนต์อย่างต่อเนื่องเพื่อตรวจสอบ...
สำหรับแผนภาพ "อุปกรณ์ป้องกันมอเตอร์ไฟฟ้าจากความร้อนสูงเกินไป"
การป้องกันมอเตอร์ไฟฟ้าจากกระแสเกินนั้นดำเนินการโดยรีเลย์ความร้อนที่ติดตั้งอยู่ในสตาร์ทเตอร์แบบแม่เหล็ก ในทางปฏิบัติ มีหลายกรณีของความล้มเหลวเนื่องจากความร้อนสูงเกินไปที่ค่าปัจจุบันที่กำหนด ที่อุณหภูมิแวดล้อมสูงขึ้น หรือสภาวะการแลกเปลี่ยนความร้อนที่ยากลำบาก และรีเลย์ความร้อนไม่ทำงาน -
สำหรับแผนภาพ "อุปกรณ์สตาร์ทแบบนุ่มนวลสำหรับเครื่องมือไฟฟ้า"
ความล้มเหลวของเครื่องมือไฟฟ้าแบบมือถือที่บางครั้งเกิดขึ้น เช่น เครื่องเจียร สว่านไฟฟ้า และเลื่อยจิ๊กซอว์ มักเกี่ยวข้องกับกระแสสตาร์ทที่สูงและโหลดไดนามิกที่สำคัญบนชิ้นส่วนกระปุกเกียร์ที่เกิดขึ้นเมื่อเครื่องยนต์สตาร์ทกะทันหัน นักสะสมมอเตอร์ไฟฟ้าที่อธิบายไว้ในนี้มีวงจรที่ซับซ้อน ประกอบด้วยตัวต้านทานที่มีความแม่นยำหลายตัว และต้องตั้งค่าอย่างอุตสาหะ การใช้ไมโครวงจรควบคุมเฟส KR1182PM1 ช่วยให้สามารถผลิตอุปกรณ์ที่ง่ายกว่ามากเพื่อจุดประสงค์เดียวกันโดยไม่จำเป็นต้องตั้งค่า คุณสามารถเชื่อมต่อใด ๆ เครื่องมือไฟฟ้ามือ, ขับเคลื่อนจากเครือข่ายเฟสเดียว 220 V, 50 Hz. เริ่มและการดับเครื่องยนต์จะดำเนินการโดยสวิตช์เครื่องมือไฟฟ้า และในสถานะปิด อุปกรณ์จะไม่กินกระแสไฟและสามารถเชื่อมต่อกับเครือข่ายได้อย่างไม่มีกำหนด โครงการอุปกรณ์ที่นำเสนอจะแสดงในรูป เสียบปลั๊ก XP1 เข้ากับเต้ารับไฟฟ้า และเสียบปลั๊กไฟของเครื่องมือไฟฟ้าเข้ากับเต้ารับ XS1 วงจรควบคุมกระแส T160 คุณสามารถติดตั้งและเชื่อมต่อซ็อกเก็ตหลายตัวแบบขนานสำหรับเครื่องมือที่ทำงานทีละตัว เมื่อวงจรมอเตอร์ของเครื่องมือไฟฟ้าถูกปิดด้วยสวิตช์ของตัวเอง แรงดันไฟฟ้าจะถูกส่งไปยังตัวควบคุมเฟส DA1 ตัวเก็บประจุ C2 เริ่มชาร์จและแรงดันไฟฟ้าที่ตกคร่อมจะค่อยๆเพิ่มขึ้น เป็นผลให้ความล่าช้าในการเปิดไทริสเตอร์ภายในของตัวควบคุมและ VSI triac ในแต่ละครึ่งรอบที่ตามมาของแรงดันไฟหลักจะลดลงซึ่งนำไปสู่การเพิ่มขึ้นอย่างราบรื่นของกระแสที่ไหลผ่านมอเตอร์และ ส่งผลให้ความเร็วของมันเพิ่มขึ้น ด้วยความจุของตัวเก็บประจุ C2 ที่ระบุในแผนภาพ การเร่งความเร็วเป็นความเร็วสูงสุดจะใช้เวลา 2...2.5 วินาที ซึ่งในทางปฏิบัติแล้วไม่สร้างความล่าช้าในการทำงาน แต่จะกำจัดความร้อน...
สำหรับวงจร "ตัวควบคุมไทรนิสเตอร์"
ตัวควบคุมกำลังไทริสเตอร์ที่นำเสนอ (รูปที่ 1) ออกแบบมาเป็นพิเศษสำหรับการควบคุมมอเตอร์ไฟฟ้าแบบสับเปลี่ยน (สว่านไฟฟ้า พัดลม ฯลฯ ) มีคุณสมบัติบางอย่าง ประการแรกมอเตอร์ไฟฟ้าที่มีไทริสเตอร์กำลังจะรวมอยู่ในหนึ่งในเส้นทแยงมุมของสะพานวงจรเรียงกระแสและแรงดันไฟฟ้าหลักจะถูกนำไปใช้กับอีกมอเตอร์หนึ่ง นอกจากนี้ไทริสเตอร์ตัวเดียวกันนั้นไม่ได้ถูกควบคุมโดยพัลส์สั้น ๆ เช่นเดียวกับในอุปกรณ์ดั้งเดิม แต่โดยอันที่กว้างกว่าเนื่องจากการหยุดทำงานระยะสั้นซึ่งเป็นลักษณะของมอเตอร์ไฟฟ้าที่ทำงานอยู่ไม่ส่งผลกระทบต่อความเสถียรของตัวควบคุม พัลส์บวกสั้น (เศษส่วนของมิลลิวินาที) จะประกอบอยู่บนทรานซิสเตอร์แบบแยกเดี่ยว ซึ่งใช้ในการควบคุมไทริสเตอร์เสริม VS1 เครื่องกำเนิดไฟฟ้าใช้พลังงานจากแรงดันไฟฟ้ารูปสี่เหลี่ยมคางหมู ซึ่งได้มาจากการจำกัดครึ่งคลื่นบวกของแรงดันไฟฟ้าไซน์ซอยด์ด้วยความถี่ 100 เฮิรตซ์โดยซีเนอร์ไดโอด VD1 เทอร์โมสตัทธรรมดาบน triac เมื่อปรากฏแต่ละครึ่งคลื่นของแรงดันไฟฟ้านี้ ตัวเก็บประจุ C1 จะเริ่มชาร์จผ่านวงจรของตัวต้านทาน R1 R3 อัตราการชาร์จของตัวเก็บประจุสามารถปรับได้ภายในขอบเขตที่กำหนดด้วยตัวต้านทานแบบแปรผัน R1 ทันทีที่แรงดันไฟฟ้าบนตัวเก็บประจุถึงเกณฑ์ของทรานซิสเตอร์ (ขึ้นอยู่กับแรงดันไฟฟ้าที่ฐานของทรานซิสเตอร์และสามารถปรับได้ด้วยตัวต้านทาน R4 และ R5) พัลส์บวกจะปรากฏบนตัวต้านทาน R5 ซึ่งจะไปที่อิเล็กโทรดควบคุมของไทริสเตอร์ VS1 ไทริสเตอร์นี้จะเปิดขึ้นและพัลส์ที่ยาวกว่า (เมื่อเทียบกับตัวควบคุม) ที่ปรากฏบนตัวต้านทาน R6 จะเปิดไทริสเตอร์กำลัง VS2 แรงดันไฟฟ้าจะถูกส่งไปยังมอเตอร์ไฟฟ้า M1 เวลาเปิดของตัวควบคุมและไทริสเตอร์กำลังดังนั้นกำลังของโหลด (กล่าวอีกนัยหนึ่งคือความเร็วในการหมุนของเพลามอเตอร์ไฟฟ้า) จะถูกควบคุมโดยตัวแปร ตัวต้านทาน R1 เนื่องจากโหลดอุปนัยรวมอยู่ในวงจรแอโนดของไทริสเตอร์ VS2...
สำหรับแผนภาพ "มอเตอร์สามเฟสในเครือข่ายเฟสเดียว"
เครื่องใช้ไฟฟ้าในครัวเรือนมอเตอร์สามเฟสในเครือข่ายเฟสเดียว BASHKATOV, 338046, ยูเครน, ภูมิภาคโดเนตสค์, Gorlovka-46, Kirova St., 14 "A" -42 บางครั้งที่บ้านจำเป็นต้องเชื่อมต่อไฟสามเฟส มอเตอร์ไฟฟ้า เครื่องปรับอากาศเข้าสู่เครือข่ายแบบเฟสเดียว ความต้องการเดียวกันนี้เกิดขึ้นกับฉันเมื่อเชื่อมต่อกับอุตสาหกรรม จักรเย็บผ้า- ในโรงงานตัดเย็บเสื้อผ้า เครื่องจักรดังกล่าวทำงานในโรงงานที่มีเครือข่ายสามเฟส และไม่มีปัญหาเกิดขึ้น สิ่งแรกที่ฉันต้องทำคือเปลี่ยนไดอะแกรมการเชื่อมต่อที่คดเคี้ยว มอเตอร์ไฟฟ้าจากดาวถึงเดลต้าโดยสังเกตขั้วของการเชื่อมต่อที่คดเคี้ยว (จุดเริ่มต้น - สิ้นสุด) (รูปที่ 1) สวิตช์นี้ช่วยให้คุณสามารถเปิดมอเตอร์ไฟฟ้าในเครือข่าย 220 V เฟสเดียว กำลังของจักรเย็บผ้าตามแผ่นคือ 0.4 kW การจัดซื้อและยิ่งกว่านั้นการเริ่มต้นตัวเก็บประจุกระดาษโลหะประเภท MBGO, MBGP, MBGCh ที่มีความจุ 50 และ 100 ไมโครฟารัดตามลำดับสำหรับแรงดันไฟฟ้าในการทำงาน 450...600 V กลายเป็นงานที่เป็นไปไม่ได้ เนื่องจากมีต้นทุนสูงในตลาดนัด การปิดอุปกรณ์วิทยุอัตโนมัติ ใช้แทนตัวเก็บประจุขั้ว (อิเล็กโทรไลต์) กระดาษโลหะและไดโอดเรียงกระแสทรงพลัง D242, D246 ผลลัพธ์ที่เป็นบวกไม่ได้ให้ มอเตอร์ไฟฟ้าไม่สตาร์ทอย่างดื้อรั้นเนื่องจากเห็นได้ชัดว่ามีความต้านทานจำกัดของไดโอดในทิศทางไปข้างหน้า นั่นเป็นเหตุผลว่าทำไมความคิดในการเปิดตัวสิ่งที่ดูเหมือนไร้สาระเมื่อเห็นแวบแรกจึงเข้ามาในใจ มอเตอร์ไฟฟ้าใช้การเชื่อมต่อระยะสั้นของตัวเก็บประจุด้วยไฟฟ้าแบบธรรมดากับเครือข่ายกระแสสลับ (รูปที่ 2) หลังจากเริ่มต้น (โอเวอร์คล็อก) มอเตอร์ไฟฟ้าตัวเก็บประจุด้วยไฟฟ้าถูกปิดและมอเตอร์ไฟฟ้าทำงานในโหมดสองเฟสโดยสูญเสียพลังงานมากถึง 50% แต่ถ้าคุณจัดเตรียมการจ่ายพลังงานไว้ล่วงหน้าหรือเป็นที่รู้กันว่ามีแหล่งจ่ายดังกล่าวอยู่ (เช่นในกรณีของฉัน) คุณก็จะสามารถยอมรับข้อเสียเปรียบนี้ได้ โดยวิธีการและระหว่างการทำงาน มอเตอร์ไฟฟ้ากับคนงาน ตัวเก็บประจุแบบเปลี่ยนเฟสมอเตอร์ไฟฟ้ายังสูญเสียความเร็วถึง 50%...
สำหรับวงจร "มิเตอร์วัดกระแสลัดวงจร"
อุปกรณ์ตรวจวัด มิเตอร์วัดกระแสลัดวงจร การหมุนลัดวงจรในขดลวดของหม้อแปลงเส้น ในขดลวดโก่งตัว ฯลฯ ตรวจพบได้ยากมาก เพื่อวัตถุประสงค์เหล่านี้ คุณสามารถใช้มิเตอร์วัดกระแสลัดวงจรได้ โดยมีหลักการคือ โครงการดังแสดงในรูป. ทรานซิสเตอร์ T1 พร้อมด้วยคอยล์ L1 และตัวเก็บประจุ C1, C2 จะสร้างเครื่องกำเนิดไฟฟ้าพร้อมข้อเสนอแนะแบบคาปาซิทีฟ ทรานซิสเตอร์ T2 มีโวลต์มิเตอร์ที่ใช้วัดความกว้างของสัญญาณที่สร้างขึ้น ตัวต้านทาน R7 ยับยั้งค่าปัจจุบันของทรานซิสเตอร์ T2 เมื่อเชื่อมต่อขดลวดทำงานเข้ากับอินพุตของมิเตอร์การอ่านค่าของอุปกรณ์วัดไม่ควรเปลี่ยนแปลงในทางปฏิบัติ หากขดลวดมีการลัดวงจร ปัจจัยด้านคุณภาพจะลดลง วงจรการสั่นและค่าที่อ่านได้ของอุปกรณ์จะลดลง Triac TS112 และวงจรบนนั้น ขั้นตอนการตั้งค่ามิเตอร์มีดังนี้ ก่อนสตาร์ทเครื่องยนต์ ตัวต้านทานแบบแปรผัน R2 ถูกตั้งค่าไว้ที่ตำแหน่งต่ำกว่าตามแผนภาพ จากนั้นจึงเปิดเครื่อง ค่าปัจจุบันควรอยู่ที่ประมาณ 0.1 mA โดยเลื่อนแถบเลื่อนตัวต้านทานปรับค่าขึ้น บรรลุการกระตุ้นตนเองของเครื่องกำเนิดไฟฟ้า ในกรณีนี้ กระแสสะสมของทรานซิสเตอร์จะเพิ่มขึ้นอย่างกะทันหันเป็นประมาณ 0.4 mA เมื่อแจ็คอินพุตลัดวงจร การสั่นควรถูกขัดจังหวะ (ซึ่งจะถูกระบุโดยการอ่านค่ามิลลิแอมป์มิเตอร์ที่ลดลง) ตรวจสอบความไวของอุปกรณ์โดยการสร้างวงจรลัดวงจรบนคอยล์ที่ใช้งานได้ของ KT312 ชนิดสามารถนำมาใช้ในมิเตอร์ได้ KT315 "วิทยุอิเล็กทรอนิกส์" (สหรัฐอเมริกา) 1-74. -
สำหรับวงจร "สวิตซ์ปรับความสว่างเรียบ"
สวิตช์ปรับความสว่างเรียบ (SBD) เป็นอุปกรณ์ที่ใช้พลังงานเองซึ่งออกแบบมาเพื่อรวมเข้ากับงานฝีมือต่างๆ เช่น เป็นตัวบ่งชี้สีอ่อนดั้งเดิมของการเปิดเครื่อง ในเวอร์ชันของผู้แต่ง PPYA ถูกสร้างขึ้นเป็นขาตั้งสำหรับต้นคริสต์มาสของเล่น แหล่งจ่ายไฟของ PPY จะเปิดขึ้นเมื่อมีการติดตั้ง "ถุงใส่ของขวัญ" ซึ่งมีแม่เหล็กถาวรไว้บนขาตั้ง (ด้านหลังลำต้นของต้นคริสต์มาสของเล่น) แม่เหล็กจะปิดหน้าสัมผัสของสวิตช์กก และ PPY จะยังคงเปิดอยู่จนกว่าถุงจะถูกย้ายไปยังตำแหน่งอื่นบนขาตั้ง (ที่ด้านข้างหรือด้านหน้าลำต้นของต้นไม้) PPYA (รูปที่ 1) ประกอบด้วย: - ตัวแบ่งแรงดันไฟฟ้าตัวต้านทาน R1-R2; - เครื่องกำเนิดแรงดันไฟฟ้าฟันเลื่อยบนองค์ประกอบ DA1.1, DA1.2, R4...R6, C1; - อินเวอร์เตอร์แบบอะนาล็อกที่ใช้องค์ประกอบ DA1.3 R7, R8; - แอมป์ปัจจุบันสำหรับ ทรานซิสเตอร์สนามผลวีที1 และวีที2; - ไฟ LED พร้อมตัวต้านทานบัลลาสต์ HL1 R9 และ HL2, R10 เมื่อปิดสวิตช์กก SF1 แรงดันไฟฟ้าของแบตเตอรี่ GB1 จะถูกส่งไปยังตัวแบ่งแรงดันไฟฟ้า R1-R2 ที่จุดกึ่งกลางของแรงดันไฟฟ้าที่ตั้งไว้ครึ่งหนึ่งโดยให้จุดการทำงานของเครื่องขยายสัญญาณการทำงาน DA1 1, DA1.2, DA1.3 วงจรความร้อนต่ำของหัวแร้ง ตัวเก็บประจุ C1 ซึ่งชาร์จใหม่เป็นระยะช่วยให้มั่นใจได้ถึงแรงดันไฟฟ้าที่เพิ่มขึ้นและลดลงที่เอาต์พุต (พิน 1) ของ DA1.1 ได้อย่างราบรื่นซึ่งช่วยให้มั่นใจในการควบคุมการทำงานของ VT2 จากเอาต์พุต DA1.1 สัญญาณจะถูกส่งไปยังอินเวอร์เตอร์แบบอะนาล็อกด้วย (เครื่องขยายสัญญาณแบบกลับด้านที่มีอัตราขยายแบบเอกภาพ) DA1.3 และจากเอาต์พุตนี้ (พิน 8) สัญญาณแบบเปลี่ยนเฟส 180° จะควบคุมการทำงานของทรานซิสเตอร์ VT1 และ VT2 จะเปิดขึ้นเมื่อแรงดันไฟฟ้าตกคร่อมเพิ่มขึ้น ประตูมากกว่า +1.4...+1.6 V และไฟ LED จะสว่างขึ้น รวมอยู่ในห่วงโซ่สต็อก ดังนั้นไฟ LED จะสลับกัน (นอกเฟส) สลับกับความถี่ที่กำหนดโดยโซ่ R4-R5-C1 การใช้โพเทนชิออมิเตอร์ R5 ความถี่ในการสร้างจะถูกตั้งค่าตั้งแต่ 0.2 ถึง 2 Hz วงจร PPY ใช้ไฟ LED สีเหลืองและสีเขียวสว่างเป็นพิเศษ กระแสไฟทำงานของ LED HL1 และ HL2...
สำหรับแผนภาพ "หน่วยควบคุมปั๊ม"
หน่วยควบคุมปั๊มอิเล็กทรอนิกส์สำหรับผู้บริโภคหากต้องการเติมอ่างเก็บน้ำเป็นระยะหรือในทางกลับกัน เอาของเหลวออกจากถัง คุณสามารถใช้อุปกรณ์ที่เป็นพื้นฐาน โครงการซึ่งแสดงไว้ในรูปที่. 1 และการออกแบบอยู่ในรูป 2. การใช้เซ็นเซอร์กกมีข้อดีบางประการ - ไม่มีการสัมผัสทางไฟฟ้าระหว่างของเหลวกับ หน่วยอิเล็กทรอนิกส์ซึ่งช่วยให้สามารถใช้สูบน้ำควบแน่น ส่วนผสมของน้ำและน้ำมัน ฯลฯ นอกจากนี้ การใช้เซ็นเซอร์เหล่านี้ยังช่วยเพิ่มความน่าเชื่อถือของตัวเครื่องและความทนทานของการทำงานอีกด้วย รูปที่ 1 ในโหมดอัตโนมัติ อุปกรณ์ทำงานดังต่อไปนี้ เมื่อระดับของเหลวในถังเพิ่มขึ้น วงแหวนแม่เหล็กถาวร 8 (รูปที่ 2) ซึ่งติดอยู่กับแกน 6 ที่เชื่อมต่อกับลูกลอย 9 จะเข้าใกล้สวิตช์กกระดับบน 3 (SF2 ในแผนภาพ) จากด้านล่างและทำให้เกิด เพื่อปิด SCR VS1 เปิดขึ้น, รีเลย์ K1 ถูกเปิดใช้งาน, เปิดมอเตอร์ปั๊มด้วยหน้าสัมผัส K1.1 และ K1.2 และปิดกั้นตัวเองด้วยหน้าสัมผัส K1.3 (หากรีเลย์ไม่ได้ปิดกั้นตัวเองอย่างชัดเจนจะต้องข้ามการพันของขดลวดด้วย ตัวเก็บประจุออกไซด์ที่มีความจุ 10... วงจรควบคุมกระแส T160 50 μF) ปั๊ม Puc2 จะสูบของเหลวออก ระดับในถังจะลดลง ใกล้ถึงระดับล่างที่ตั้งไว้ แม่เหล็กเข้าใกล้ Gorkom 2 (SF3 ตามแผนภาพ) ของระดับล่างและทำให้เกิดการลัดวงจร SCR VS2 เปิดขึ้น รีเลย์ K2 ถูกเปิดใช้งาน และหน้าสัมผัส K2.1 จะตัดวงจรของอิเล็กโทรดควบคุมของ SCR ไทริสเตอร์ปิดโดยปิดมอเตอร์ปั๊ม หากหลังจากปิดหน้าสัมผัสของสวิตช์กก 3 และเปิดปั๊มด้วยเหตุผลบางประการระดับของเหลวยังคงเพิ่มขึ้นต่อไป สวิตช์เตือนกก 4 จะปิดลงและเสียงกระดิ่งไฟฟ้า NA1 จะดังขึ้น เมื่อระดับของเหลวเปลี่ยนไป ก้านพร้อมกับลูกลอย 9 จะทำการเคลื่อนที่แบบลูกสูบในวงแหวนนำ 7. 5 กระดุมเสิร์ฟสำหรับ...
สำหรับโครงการ "การเปิดสวิตช์เส้นใย kinescope อย่างราบรื่น"
โทรทัศน์การเปิดสวิตช์ไส้หลอด kinescope อย่างราบรื่น วงจรที่แสดงในรูปใช้สำหรับไคเนสสโคปที่มี Un = 6.3 V และกระแสไส้หลอด In = 0.3 A เช่น สำหรับหลอดภาพขาวดำส่วนใหญ่ IC DA1 ติดอยู่กับหม้อน้ำที่มีพื้นที่ประมาณ 20 cm2 (คุณสามารถใช้พื้นที่ว่างของบอร์ดที่ทำจากไฟเบอร์กลาสฟอยล์) ตัวต้านทานที่ปรับแล้ว R1 จะตั้งค่าแรงดันไฟฟ้าของไส้หลอดที่ต้องการ (7 V) โดยเฉพาะอย่างยิ่งด้วย SZ ปิดอยู่ เวลาที่เพิ่มขึ้นของแรงดันไฟฟ้าถูกกำหนดโดยความจุของตัวเก็บประจุ SZ ในความเป็นจริงแรงดันไฟฟ้าจะเพิ่มขึ้นนานกว่า 30 วินาที (ยิ่งมากก็ยิ่งช้าเนื่องจากการรั่วไหลผ่าน R1) S. DMITRIEV, 429541, Chuvashia, Morgushsky District, Kalaykasy อุปกรณ์ตัวที่สองให้ความร้อนแก่เส้นใย kinescope เป็นสีดำและ - จอภาพสีขาว "Electronics" MC6105 และไม่ชอบ สำหรับการอุ่นเครื่องหนึ่งชั่วโมง การดำเนินการสแกนเส้นของจอภาพจะถูกบล็อก หลังจากการทำความร้อนอย่างราบรื่น แรงดันไฟฟ้าเต็ม 12V จะถูกส่งไปยังเส้นใย kinescope ผ่านทางหน้าสัมผัสปิด K1.1และติดตั้งในแนวตั้งฉากกับบอร์ดมอนิเตอร์ในพื้นที่ว่างใดๆ รีเลย์ K1 - ประเภท RES-64 RS4.569.724 หรือสวิตช์กกอื่น ๆ สำหรับแรงดันไฟฟ้าที่ใช้งานไม่เกิน 7 V และกระแสไม่เกิน 5 mA เมื่อเปลี่ยนรีเลย์คุณจะต้องเปลี่ยนความต้านทานของตัวต้านทาน R5 ตามนั้น อุปกรณ์ไม่จำเป็นต้องมีการปรับเปลี่ยน A. DAINEKO, 247416, ภูมิภาค Gomel, เขต Svetlogorsk, หมู่บ้าน Polesie, เลน วอสโทชนี 11.(RL-8/96)...
สำหรับวงจร "เฟสกลับด้านคาสเคด"
สำหรับนักออกแบบวิทยุสมัครเล่น คาสเคดแบบกลับเฟสแบบทรานซิสเตอร์ตัวเดียวจะให้แรงดันเอาต์พุตเท่ากัน แต่ความต้านทานเอาต์พุตไม่เท่ากัน ข้อเสียเปรียบนี้จะถูกกำจัดโดยพื้นฐาน โครงการดังแสดงในรูป เครื่องกำเนิดไฟฟ้าสร้างกระแสบนทรานซิสเตอร์ T1 ด้วยเหตุนี้ ความต้านทานภายในสูงของเครื่องกำเนิดไฟฟ้าจึงเชื่อมต่อขนานกับตัวต้านทาน R6 ความต้านทานต่อขนานกับตัวต้านทาน R5 นักสะสมการเปลี่ยนแปลงของทรานซิสเตอร์ T2 ซึ่งมากกว่าความต้านทานของตัวต้านทาน R1 หลายเท่า ดังนั้นความต้านทานเอาต์พุตจะถูกกำหนดโดยความต้านทานของตัวต้านทาน R5 และ R6 เมื่อใช้องค์ประกอบที่ระบุไว้ แผนผังและทรานซิสเตอร์ที่มีอัตราขยายคงที่ 60 (ทรานซิสเตอร์ T1) และ 30 (ทรานซิสเตอร์ T2) การเรียงซ้อนให้ค่าเกนประมาณ 4.8. อุปกรณ์สามารถใช้ทรานซิสเตอร์ MP40 (T1) และ KT315 (T2) "Radio fernsehen eleckfronik" (GDR), 1974, N 13...
มอเตอร์ไฟฟ้าเป็นเครื่องจักรไฟฟ้าที่พบมากที่สุดในโลก ไม่ใช่องค์กรอุตสาหกรรมแห่งเดียว ไม่มีกระบวนการทางเทคโนโลยีเดียวที่สามารถทำได้หากไม่มีพวกเขา การหมุนของพัดลม, ปั๊ม, การเคลื่อนย้ายสายพานลำเลียง, การเคลื่อนย้ายของเครน - นี่เป็นรายการงานที่ไม่สมบูรณ์ แต่มีนัยสำคัญที่แก้ไขได้ด้วยความช่วยเหลือของเครื่องยนต์
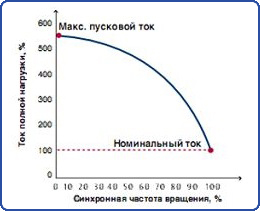
อย่างไรก็ตามมีความแตกต่างกันเล็กน้อยในการทำงานของมอเตอร์ไฟฟ้าทั้งหมดโดยไม่มีข้อยกเว้น: ในขณะที่สตาร์ทมอเตอร์จะใช้กระแสไฟขนาดใหญ่ในช่วงสั้น ๆ เรียกว่ากระแสสตาร์ท
เมื่อใช้แรงดันไฟฟ้ากับขดลวดสเตเตอร์ ความเร็วในการหมุนของโรเตอร์จะเป็นศูนย์ ต้องขยับโรเตอร์และหมุนตามความเร็วที่กำหนด ซึ่งต้องใช้พลังงานมากกว่าที่จำเป็นสำหรับโหมดการทำงานปกติอย่างมาก
 ภายใต้โหลด กระแสไหลเข้าจะสูงกว่าขณะไม่ได้ใช้งาน ความต้านทานทางกลต่อการหมุนจากกลไกที่ขับเคลื่อนโดยเครื่องยนต์จะถูกเพิ่มเข้ากับน้ำหนักของโรเตอร์ ในทางปฏิบัติ พวกเขาพยายามลดอิทธิพลของปัจจัยนี้ให้เหลือน้อยที่สุด ตัวอย่างเช่น สำหรับพัดลมที่มีกำลังแรง แดมเปอร์ในท่ออากาศจะปิดโดยอัตโนมัติเมื่อสตาร์ทเครื่อง
ภายใต้โหลด กระแสไหลเข้าจะสูงกว่าขณะไม่ได้ใช้งาน ความต้านทานทางกลต่อการหมุนจากกลไกที่ขับเคลื่อนโดยเครื่องยนต์จะถูกเพิ่มเข้ากับน้ำหนักของโรเตอร์ ในทางปฏิบัติ พวกเขาพยายามลดอิทธิพลของปัจจัยนี้ให้เหลือน้อยที่สุด ตัวอย่างเช่น สำหรับพัดลมที่มีกำลังแรง แดมเปอร์ในท่ออากาศจะปิดโดยอัตโนมัติเมื่อสตาร์ทเครื่อง
ในขณะที่กระแสเริ่มต้นไหลจากเครือข่าย จะมีการใช้พลังงานจำนวนมากเพื่อนำมอเตอร์ไฟฟ้าเข้าสู่โหมดการทำงานปกติ ยิ่งมอเตอร์ไฟฟ้ามีกำลังมากเท่าใดก็ยิ่งต้องใช้กำลังในการเร่งความเร็วมากขึ้นเท่านั้น ไม่ใช่ทั้งหมด เครือข่ายไฟฟ้ายอมรับระบอบการปกครองนี้โดยไม่มีผลกระทบ
การบรรทุกเกินพิกัดของสายจ่ายไฟจะทำให้แรงดันไฟฟ้าเครือข่ายลดลงอย่างหลีกเลี่ยงไม่ได้ สิ่งนี้ไม่เพียงทำให้การสตาร์ทมอเตอร์ไฟฟ้ายากขึ้นเท่านั้น แต่ยังส่งผลกระทบต่อผู้บริโภครายอื่นด้วย
และตัวมอเตอร์ไฟฟ้าเองก็เผชิญกับภาระทางกลและทางไฟฟ้าที่เพิ่มขึ้นในระหว่างกระบวนการสตาร์ท กลไกเกี่ยวข้องกับแรงบิดที่เพิ่มขึ้นบนเพลา อุปกรณ์ไฟฟ้าที่เกี่ยวข้องกับการเพิ่มขึ้นของกระแสไฟฟ้าในระยะสั้นส่งผลต่อฉนวนของขดลวดสเตเตอร์และโรเตอร์ การเชื่อมต่อหน้าสัมผัส และอุปกรณ์สตาร์ท
วิธีการลดกระแสไหลเข้า
มอเตอร์ไฟฟ้ากำลังต่ำที่มีบัลลาสต์ราคาไม่แพงสตาร์ทได้ค่อนข้างดีโดยไม่ต้องใช้วิธีใดๆ การลดกระแสเริ่มต้นหรือการเปลี่ยนความเร็วในการหมุนไม่สามารถทำได้ในเชิงเศรษฐกิจ
แต่เมื่ออิทธิพลต่อโหมดการทำงานของเครือข่ายในระหว่างกระบวนการเริ่มต้นมีความสำคัญ กระแสไหลเข้าจะต้องลดลง สามารถทำได้โดย:
- การใช้มอเตอร์ไฟฟ้ากับโรเตอร์แบบพันแผล
- การใช้วงจรเปลี่ยนขดลวดจากสตาร์เป็นเดลต้า
- การใช้ซอฟต์สตาร์ทเตอร์
- การใช้ตัวแปลงความถี่
วิธีการเหล่านี้อย่างน้อยหนึ่งวิธีเหมาะสมกับแต่ละกลไก
มอเตอร์ไฟฟ้าพร้อมโรเตอร์แบบพันแผล
 การใช้มอเตอร์ไฟฟ้าแบบอะซิงโครนัสกับโรเตอร์แบบพันแผลในพื้นที่ทำงานที่มีสภาพการทำงานที่ยากลำบากเป็นรูปแบบที่เก่าแก่ที่สุดในการลดกระแสสตาร์ท หากไม่มีสิ่งเหล่านี้ การทำงานของเครนไฟฟ้า รถขุด รวมถึงเครื่องย่อย เครื่องคัดแยก และโรงสี ซึ่งแทบจะไม่ได้เริ่มทำงานเมื่อไม่มีผลิตภัณฑ์ในกลไกขับเคลื่อน ก็เป็นไปไม่ได้
การใช้มอเตอร์ไฟฟ้าแบบอะซิงโครนัสกับโรเตอร์แบบพันแผลในพื้นที่ทำงานที่มีสภาพการทำงานที่ยากลำบากเป็นรูปแบบที่เก่าแก่ที่สุดในการลดกระแสสตาร์ท หากไม่มีสิ่งเหล่านี้ การทำงานของเครนไฟฟ้า รถขุด รวมถึงเครื่องย่อย เครื่องคัดแยก และโรงสี ซึ่งแทบจะไม่ได้เริ่มทำงานเมื่อไม่มีผลิตภัณฑ์ในกลไกขับเคลื่อน ก็เป็นไปไม่ได้
การลดกระแสเริ่มต้นทำได้โดยการค่อยๆ ถอดตัวต้านทานออกจากวงจรโรเตอร์ ในตอนแรก ในขณะที่ใช้แรงดันไฟฟ้า ความต้านทานสูงสุดที่เป็นไปได้จะเชื่อมต่อกับโรเตอร์ เมื่อรีเลย์เวลาเร่งความเร็ว คอนแทคเตอร์จะเปิดทีละตัวซึ่งจะข้ามส่วนต้านทานแต่ละส่วน เมื่อสิ้นสุดการเร่งความเร็ว ความต้านทานเพิ่มเติมที่เชื่อมต่อกับวงจรโรเตอร์จะเป็นศูนย์
มอเตอร์เครนไม่มีการสลับสเตจอัตโนมัติด้วยตัวต้านทาน สิ่งนี้เกิดขึ้นตามความประสงค์ของผู้ควบคุมเครนในการเคลื่อนย้ายคันโยกควบคุม
การสลับไดอะแกรมการเชื่อมต่อขดลวดสเตเตอร์
 ในเบอร์โน (บล็อกจ่ายสตาร์ทการพันของขดลวด) ของมอเตอร์ไฟฟ้าสามเฟสใดๆ จะมีขั้วต่อ 6 ขั้วจากขดลวดของทุกเฟส ดังนั้นจึงสามารถเชื่อมต่อกันเป็นรูปดาวหรือรูปสามเหลี่ยมได้
ในเบอร์โน (บล็อกจ่ายสตาร์ทการพันของขดลวด) ของมอเตอร์ไฟฟ้าสามเฟสใดๆ จะมีขั้วต่อ 6 ขั้วจากขดลวดของทุกเฟส ดังนั้นจึงสามารถเชื่อมต่อกันเป็นรูปดาวหรือรูปสามเหลี่ยมได้
ด้วยเหตุนี้จึงมีความคล่องตัวในการใช้มอเตอร์ไฟฟ้าแบบอะซิงโครนัส วงจรเชื่อมต่อแบบสตาร์ได้รับการออกแบบสำหรับระดับแรงดันไฟฟ้าที่สูงกว่า (เช่น 660V) และการเชื่อมต่อแบบสามเหลี่ยมสำหรับระดับแรงดันไฟฟ้าที่ต่ำกว่า (ในตัวอย่างนี้คือ 380V)
แต่ที่แรงดันไฟฟ้าที่กำหนดซึ่งสอดคล้องกับวงจรเดลต้า คุณสามารถใช้วงจรสตาร์เพื่อเร่งความเร็วมอเตอร์ไฟฟ้าล่วงหน้าได้ ในกรณีนี้การม้วนจะทำงานที่ แรงดันตกแหล่งจ่ายไฟ (380V แทน 660) และกระแสเริ่มต้นจะลดลง
ในการควบคุมกระบวนการสวิตชิ่ง คุณจะต้องใช้สายเคเบิลเพิ่มเติมในมอเตอร์ไฟฟ้า เนื่องจากมีการใช้ขั้วต่อขดลวดทั้ง 6 เส้น มีการติดตั้งสตาร์ทเตอร์และรีเลย์เวลาเพิ่มเติมเพื่อควบคุมการทำงาน
ตัวแปลงความถี่
สองวิธีแรกไม่สามารถใช้ได้ทุกที่ แต่รุ่นต่อมาซึ่งมีวางจำหน่ายค่อนข้างเร็ว ๆ นี้ทำให้สามารถสตาร์ทมอเตอร์ไฟฟ้าแบบอะซิงโครนัสได้อย่างราบรื่น
ตัวแปลงความถี่เป็นอุปกรณ์เซมิคอนดักเตอร์ที่ซับซ้อนซึ่งรวมเอาระบบอิเล็กทรอนิกส์กำลังและองค์ประกอบของเทคโนโลยีไมโครโปรเซสเซอร์เข้าด้วยกัน ส่วนกำลังจะแก้ไขและทำให้แรงดันไฟฟ้าหลักเรียบขึ้น โดยเปลี่ยนเป็นแรงดันไฟฟ้าคงที่ ส่วนเอาต์พุตของแรงดันไฟฟ้านี้ก่อตัวเป็นไซน์ซอยด์ที่มีความถี่แปรผันจากศูนย์ถึงค่าระบุ - 50 Hz
ด้วยเหตุนี้ จึงประหยัดพลังงานได้: หน่วยที่ขับเคลื่อนด้วยการหมุนจะไม่ทำงานด้วยประสิทธิภาพการผลิตที่มากเกินไป โดยอยู่ในโหมดที่กำหนดอย่างเคร่งครัด นอกจากนี้กระบวนการทางเทคโนโลยียังมีโอกาสที่จะได้รับการปรับแต่งอย่างละเอียดอีกด้วย

แต่สิ่งสำคัญในขอบเขตของปัญหาที่กำลังพิจารณา: ตัวแปลงความถี่ช่วยให้สตาร์ทมอเตอร์ไฟฟ้าได้อย่างราบรื่น โดยไม่มีแรงกระแทกและการกระตุก ไม่มีกระแสเริ่มต้นเลย
ซอฟต์สตาร์ทเตอร์
ชุดซอฟต์สตาร์ทสำหรับมอเตอร์ไฟฟ้าเป็นตัวแปลงความถี่เดียวกัน แต่มีฟังก์ชันการทำงานที่จำกัด ใช้งานได้เฉพาะเมื่อมอเตอร์ไฟฟ้าเร่งความเร็วและเปลี่ยนความเร็วในการหมุนอย่างราบรื่นจากค่าต่ำสุดที่ระบุไปเป็นค่าที่ระบุ
เพื่อป้องกันการทำงานของอุปกรณ์อย่างไร้ประโยชน์หลังจากการเร่งความเร็วของมอเตอร์ไฟฟ้าเสร็จสิ้น จึงมีการติดตั้งคอนแทคเตอร์บายพาสไว้ใกล้เคียง จะเชื่อมต่อมอเตอร์ไฟฟ้าเข้ากับเครือข่ายโดยตรงหลังจากการสตาร์ทเสร็จสิ้น
เมื่อทำการอัพเกรดอุปกรณ์ นี่เป็นวิธีที่ง่ายที่สุด มักจะสามารถทำได้ด้วยมือของคุณเองโดยไม่ต้องมีผู้เชี่ยวชาญเฉพาะทางสูงเข้ามาเกี่ยวข้อง มีการติดตั้งอุปกรณ์เข้าที่ สตาร์ทแม่เหล็กซึ่งควบคุมการสตาร์ทของมอเตอร์ไฟฟ้า อาจจำเป็นต้องเปลี่ยนสายเคเบิลเป็นแบบมีชีลด์ จากนั้นพารามิเตอร์ของมอเตอร์ไฟฟ้าจะถูกป้อนลงในหน่วยความจำของอุปกรณ์และพร้อมสำหรับการดำเนินการ
แต่ไม่ใช่ทุกคนที่สามารถจัดการตัวแปลงความถี่เต็มรูปแบบได้ด้วยตัวเอง ดังนั้นการใช้สำเนาเดี่ยวจึงไม่มีความหมาย การติดตั้งตัวแปลงความถี่มีความสมเหตุสมผลเฉพาะเมื่อดำเนินการปรับปรุงอุปกรณ์ไฟฟ้าทั่วไปขององค์กรให้ทันสมัยเท่านั้น
- แบบอะซิงโครนัส,
- นักสะสม;
- ซิงโครนัส
เครื่องยนต์ใดๆ ที่ระบุไว้เป็นส่วนหนึ่งของระบบขับเคลื่อนไฟฟ้า ซึ่งออกแบบมาเพื่อสื่อสารกับน้ำหนักบรรทุก มอเตอร์จะปิดแล้วรีสตาร์ท ทั้งนี้ขึ้นอยู่กับโหลด ต่อไป เราจะพูดถึงรายละเอียดเพิ่มเติมเกี่ยวกับสิ่งที่เกิดขึ้นเมื่อสตาร์ทมอเตอร์ไฟฟ้า และวิธีเพิ่มประสิทธิภาพกระบวนการนี้
จะเกิดอะไรขึ้นเมื่อสตาร์ทมอเตอร์แบบอะซิงโครนัส
เพื่อทำความเข้าใจว่าควรใช้อุปกรณ์ใดในการสตาร์ทมอเตอร์ไฟฟ้าอย่างนุ่มนวล คุณจำเป็นต้องรู้หลักการทำงานของอุปกรณ์นั้น มอเตอร์ที่พบบ่อยที่สุดคือมอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์แบบกรงกระรอก ของพวกเขา การออกแบบที่เรียบง่ายและความน่าเชื่อถือที่สอดคล้องกันเป็นตัวกำหนดความนิยมของเครื่องใช้ไฟฟ้าเหล่านี้ แม้ว่าโรเตอร์จะหมุนและรูปร่างของมันได้รับการปรับให้เหมาะสมสำหรับกระบวนการนี้ แต่ก็ไม่มีอะไรมากไปกว่าขดลวดทุติยภูมิของหม้อแปลงไฟฟ้า
และอย่างที่คุณทราบ ถ้ากระแสไหลในขดลวดปฐมภูมิ สนามแม่เหล็กไฟฟ้าจะปรากฏขึ้นในแกนกลาง ฟังก์ชั่นที่อยู่ในรายการในเอ็นจิ้นอะซิงโครนัสนั้นดำเนินการโดยสเตเตอร์ สนามแม่เหล็กซึ่งหมุนรอบโรเตอร์ไม่เหมือนกับหม้อแปลงไฟฟ้า ทำให้เกิดกระแสที่เกี่ยวข้องกับการหมุนนี้ และยิ่งความแตกต่างระหว่างความเร็วของสนามกับโรเตอร์มากเท่าไร กระแสในส่วนหลังก็จะยิ่งมากขึ้นเท่านั้น ท้ายที่สุดแล้วโรเตอร์นั้นเป็นขดลวดที่มีการลัดวงจร และเนื่องจากมีการเชื่อมต่อหม้อแปลงไฟฟ้า หมายความว่ากระแสในขดลวดเป็นสัดส่วนโดยตรง
ตอนนี้เราแสดงรายการเงื่อนไขที่มีอยู่เมื่อสตาร์ทมอเตอร์อะซิงโครนัสที่ขับเคลื่อนจากเครือข่ายอุตสาหกรรม ก่อนอื่นเรามาดูตัวเลือกสามเฟสกันก่อน:
- ความตึงเครียดคงที่
- ความถี่คงที่
- โรเตอร์อยู่นิ่ง
การเชื่อมต่อมอเตอร์แบบอะซิงโครนัสเข้ากับเครือข่ายไฟฟ้าจะสร้างสนามแม่เหล็กที่กำลังหมุนทันที ในกรณีนี้ความแตกต่างของความเร็วระหว่างมันกับโรเตอร์ (ที่เรียกว่าสลิปแสดงเป็นเปอร์เซ็นต์ของความเร็วในการหมุน สนามแม่เหล็กไฟฟ้าสเตเตอร์) สูงสุด และด้วยเหตุนี้ มันจึงเหมือนกับโหมดลัดวงจรของหม้อแปลงไฟฟ้า หากกำลังของเครื่องยนต์สูง กระแสสตาร์ทจะอยู่ในระดับที่ถือเป็นภาวะฉุกเฉินสำหรับหม้อแปลงไฟฟ้าที่มีกำลังไฟฟ้าใกล้เคียงกัน
อุปกรณ์ใดที่จะใช้เพื่อจำกัดสิ่งเหล่านั้นค่อนข้างชัดเจน ควร:
- หรือลดแรงดันไฟฟ้าที่ขดลวดสเตเตอร์ในขณะที่โรเตอร์เร่งความเร็ว
- หรือหมุนโรเตอร์จนสเตเตอร์เชื่อมต่อกับโครงข่ายไฟฟ้า
- คุณยังสามารถเปลี่ยนแปลงการออกแบบได้อีกด้วย มอเตอร์แบบอะซิงโครนัส.
การสลับวงจรขดลวด
โรเตอร์สามารถขับเคลื่อนได้ในระบบขับเคลื่อนไฟฟ้าบางประเภทเท่านั้น ด้วยเหตุผลนี้ วิธีการนี้จึงไม่ปกติ เหลือสองอัน อันแรกใช้กันอย่างแพร่หลายที่สุด แต่การได้รับแรงดันไฟฟ้าตกโดยไม่มีการสูญเสียนั้นไม่ใช่เรื่องง่าย ใน วงจรสามเฟสซึ่งสามารถทำได้โดยการเปลี่ยนจากเดลต้าเป็นสตาร์และย้อนกลับ แรงดันไฟฟ้าเชิงเส้นที่ใช้กับขดลวดสเตเตอร์ของเครื่องยนต์ช่วยให้มั่นใจได้ถึงประสิทธิภาพที่สูงขึ้นในโหมดการทำงาน แต่กระแสสตาร์ทในวงจรสามเหลี่ยมจะมีค่ามากกว่า
ดังนั้นการเปลี่ยนไปใช้วงจรสตาร์จึงช่วยลดกระแสสตาร์ทของมอเตอร์อะซิงโครนัสได้อย่างมาก นี่เป็นวิธีที่ง่ายที่สุดสำหรับการเริ่มต้นที่ค่อนข้างราบรื่น ใช้องค์ประกอบเพิ่มเติมขั้นต่ำเนื่องจากแรงดันไฟฟ้าตกถูกสร้างขึ้นโดยความสามารถของเครือข่ายไฟฟ้าสามเฟสนั่นเอง องค์ประกอบเหล่านี้เป็นสวิตช์และไดอะแกรมแสดงอยู่ด้านล่าง แต่รูปแบบง่ายๆดังกล่าวใช้ได้เฉพาะในเท่านั้น เครือข่ายสามเฟส- ในรุ่นเฟสเดียวไม่มีแรงดันไฟฟ้าที่มีประสิทธิภาพต่ำกว่าแรงดันไฟฟ้าเฟส

การใช้ตัวต้านทาน
เพื่อให้ได้อัตราเร่งที่นุ่มนวลที่สุดเท่าที่จะเป็นไปได้ของเครื่องยนต์ จำเป็นต้องใช้องค์ประกอบที่ให้แรงดันไฟฟ้าตกที่เหมาะสม เพื่อจุดประสงค์นี้มีการใช้สิ่งต่อไปนี้:
- ตัวต้านทาน;
- โช้ก (เครื่องปฏิกรณ์);
- หม้อแปลงไฟฟ้าอัตโนมัติ;
- เครื่องขยายเสียงแม่เหล็ก
วิธีการเหล่านี้เหมาะสำหรับทั้งเครือข่ายสามเฟสและเฟสเดียว ไม่ว่าในกรณีใด คุณจะต้องใช้สวิตช์ เนื่องจากในบางจุดคุณจะต้องเชื่อมต่อเครื่องยนต์เข้ากับเครือข่ายโดยตรง วงจรที่มีตัวต้านทานมีขนาดกะทัดรัดที่สุด อย่างไรก็ตาม เมื่อกำลังของเครื่องยนต์เพิ่มขึ้น กำลังของตัวต้านทานสตาร์ทก็จะเพิ่มขึ้นตามไปด้วย เนื่องจากได้รับความร้อน เวลาเริ่มต้นจะต้องอยู่ภายในช่วงอุณหภูมิที่อนุญาต มิฉะนั้นตัวต้านทานจะไม่สามารถใช้งานได้เนื่องจากความร้อนสูงเกินไป วงจรซอฟต์สตาร์ทโดยใช้ตัวต้านทานแสดงอยู่ด้านล่าง

การใช้ตัวเหนี่ยวนำ
หากคุณโคลนวงจร คุณสามารถสตาร์ทแบบนุ่มนวลได้โดยใช้ตัวต้านทานหลายกลุ่มที่เชื่อมต่อแบบขนาน ซึ่งจะช่วยลดภาระความร้อนลง แต่การเพิ่มเวลาเริ่มต้นอย่างนุ่มนวลจะมาพร้อมกับการสูญเสียพลังงานที่เพิ่มขึ้นในตัวต้านทานเหล่านี้ ด้วยเหตุนี้จึงใช้องค์ประกอบอุปนัยแทนตัวต้านทาน ในกรณีที่ง่ายที่สุด สิ่งเหล่านี้คือโช้ค นี่เป็นวิธีแก้ปัญหาที่ยุ่งยากและมีราคาแพงกว่า แต่จำเป็นต้องใช้งานเพื่อลดการสูญเสียพลังงานเนื่องจากการรีสตาร์ทเครื่องยนต์บ่อยครั้ง ลักษณะที่ปรากฏของเครื่องปฏิกรณ์สำหรับเครื่องยนต์อะซิงโครนัสอันทรงพลังแสดงไว้ด้านล่าง

หากการเหนี่ยวนำที่ใช้ในระหว่างการสตาร์ทถูกสร้างขึ้นในรูปแบบของตัวแปลงอัตโนมัติที่มีหน้าสัมผัสเคลื่อนที่เคลื่อนที่ไปตามการหมุนของขดลวด คุณสามารถแก้ไขจุดบกพร่องของกระบวนการเริ่มต้นได้อย่างเหมาะสมที่สุด หรือควบคุมโดยการย้ายหน้าสัมผัสที่กำลังเคลื่อนที่ ข้อเสียของตัวเลือกนี้คือประกายไฟที่หลีกเลี่ยงไม่ได้เมื่อสัมผัสทางกล ด้วยเหตุนี้จึงใช้ได้กับกำลังเครื่องยนต์ที่ค่อนข้างต่ำเท่านั้น โครงร่างของซอฟต์สตาร์ทเตอร์ที่มีเครื่องปฏิกรณ์และหม้อแปลงอัตโนมัติแสดงไว้ด้านล่าง

วงจรสตาร์ทแบบนุ่มนวล:
ก) กับเครื่องปฏิกรณ์;
b) ด้วยตัวแปลงอัตโนมัติ
1, 2 และ 3 – สวิตช์ที่ควบคุมสวิตช์
เพื่อการเริ่มต้นที่ราบรื่นโดยไม่มีข้อเสียที่มีอยู่ในตัวแปลงอัตโนมัติที่มีหน้าสัมผัสแบบเคลื่อนที่จึงใช้แอมพลิฟายเออร์แม่เหล็ก พวกเขาใช้การทำให้เป็นแม่เหล็กซึ่งช่วยให้คุณเปลี่ยนค่าของปฏิกิริยารีแอคแตนซ์ได้ การออกแบบแอมพลิฟายเออร์แม่เหล็กนั้นค่อนข้างหลากหลาย แต่ข้อได้เปรียบหลักของพวกเขาคือกระแสไฟฟ้าต่ำและตามกำลังที่ใช้ในการควบคุม พวกเขาไม่มีหน้าสัมผัสควบคุมที่กระแสน้ำขนาดใหญ่ไหลผ่าน หนึ่งในไดอะแกรมแสดงอยู่ด้านล่าง

มอเตอร์โรเตอร์บาดแผล
อุปกรณ์สตาร์ทแบบนุ่มนวลที่ถือว่าทั้งหมดสำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสจะใช้ที่ด้านสเตเตอร์ แต่เมื่อการรีสตาร์ทอย่างต่อเนื่องเป็นกระบวนการทำงานปกติของเครื่องยนต์ การออกแบบของเครื่องยนต์ก็เปลี่ยนไป ทำให้เกิดเฟสของโรเตอร์ นี้ โซลูชั่นที่สร้างสรรค์ทำให้สามารถควบคุมกระแสที่เกิดขึ้นระหว่างการเร่งความเร็วของเครื่องยนต์ได้อย่างมีประสิทธิภาพมากขึ้น การออกแบบและคำแนะนำในการใช้งานอุปกรณ์สตาร์ทแบบซอฟต์สำหรับมอเตอร์โรเตอร์แบบพันแผลมีดังต่อไปนี้:

การใช้สวิตช์สารกึ่งตัวนำ
ชุดซอฟต์สตาร์ทที่ระบุไว้ทั้งหมดใช้งานมาหลายปีแล้ว พวกเขามีคุณสมบัติที่สำคัญที่ทำให้เหนือคู่แข่ง อุปกรณ์เหล่านี้ไม่มีพารามิเตอร์ทางไฟฟ้าซึ่งส่วนเกินจะทำให้ความต้านทานหายไป (พังทลาย) ด้วยเหตุนี้จึงมีความน่าเชื่อถือมากที่สุดแม้ว่าจะล้าสมัยแล้วก็ตาม อุปกรณ์ที่ทันสมัยซอฟต์สตาร์ทใช้สวิตช์เซมิคอนดักเตอร์ควบคุม (ไทริสเตอร์และทรานซิสเตอร์) นี่คือการควบคุมความกว้างพัลส์ที่เรียกว่า
สวิตช์จะตัดส่วนหนึ่งของแรงดันไฟฟ้าไซน์ซอยด์เมื่อเวลาผ่านไป เป็นผลให้ค่าแรงดันไฟฟ้าเฉลี่ยสามารถเปลี่ยนจากศูนย์เป็น 220 V จริงได้ ดังนั้นสวิตช์เซมิคอนดักเตอร์จึงเป็นตัวเลือกที่มีประสิทธิภาพสูงสุดในการสร้างซอฟต์สตาร์ทเตอร์สำหรับมอเตอร์ไฟฟ้า แต่ในขณะเดียวกัน สวิตช์อาจมีทั้งการสลายตัวทางความร้อนและผลกระทบที่คล้ายกันเนื่องจากแรงดันไฟฟ้าและแอมพลิจูดกระแสเกิน ดังนั้นกุญแจจะต้องได้รับการระบายความร้อนอย่างมีประสิทธิภาพและเลือกตามสภาพการทำงานของเครื่องยนต์

อุปกรณ์ที่มีการควบคุมความกว้างพัลส์สามารถใช้ได้ในเครือข่ายใดๆ โดยไม่คำนึงถึงจำนวนเฟส แผนภาพหนึ่งดังกล่าวแสดงอยู่ด้านล่าง หลังจากที่โรเตอร์เร่งความเร็ว หน้าสัมผัสจะปิดและป้องกันปุ่มจากความเสียหายจากกระแสและแรงดันไฟกระชาก


การสตาร์ทมอเตอร์ไฟฟ้าแบบสับเปลี่ยนอย่างราบรื่น
แม้จะมีความแตกต่างพื้นฐานในการออกแบบเมื่อเทียบกับมอเตอร์แบบอะซิงโครนัส การสตาร์ทมอเตอร์สับเปลี่ยนยังมาพร้อมกับกระแสไฟฟ้ากระดองขนาดใหญ่ซึ่งก็คือโรเตอร์ โดยพื้นฐานแล้ว นี่คือชุดโช้กที่มีการสลับตามลำดับของแต่ละโช้ก ยิ่งแผ่นสะสมแรงดันไฟฟ้าสัมผัสกับแผ่นสะสมนานขึ้น ซึ่งเป็นสิ่งที่เกิดขึ้นทันทีหลังจากเปิดเครื่องและใช้แรงดันไฟฟ้า แรงดึงดูดของแกนกลางก็จะยิ่งแข็งแกร่งขึ้นและค่าที่กระแสไฟฟ้าสามารถเข้าถึงได้ก็จะมากขึ้นตามไปด้วย
เมื่อสเตเตอร์ได้รับการออกแบบให้เป็นแม่เหล็กถาวร เฉพาะกระดองเท่านั้นที่ต้องการแหล่งพลังงาน แต่ในกรณีนี้ความตึงเครียดจะคงที่เท่านั้น ชุดซอฟต์สตาร์ทที่ขับเคลื่อนโดยแหล่งนี้ผลิตขึ้นเฉพาะกับองค์ประกอบที่สามารถสร้างการตกได้เท่านั้น แรงดันไฟฟ้ากระแสตรง.
องค์ประกอบเหล่านี้คือ:
- ตัวต้านทาน,
- ทรานซิสเตอร์,
- ไทริสเตอร์แบบล็อคได้
หากสเตเตอร์ได้รับการออกแบบให้เป็นแม่เหล็กไฟฟ้า แสดงว่าเครื่องยนต์สามารถทำงานได้ แรงดันไฟฟ้ากระแสสลับ- จากที่กล่าวข้างต้น ซอฟต์สตาร์ทเตอร์ที่ทดสอบตามเวลาเดียวกันซึ่งใช้ได้กับมอเตอร์อะซิงโครนัสเฟสเดียวนั้นเหมาะสำหรับมอเตอร์สับเปลี่ยน:
- ตัวต้านทาน (รีโอสแตท);
- โช้ก (เครื่องปฏิกรณ์);
- หม้อแปลงไฟฟ้าอัตโนมัติ;
- เครื่องขยายเสียงแม่เหล็ก
ตลอดจนโซลูชันทางเทคนิคสมัยใหม่ที่ใช้สวิตช์เซมิคอนดักเตอร์ รูปภาพของพวกเขาคล้ายกับที่แสดงไว้ด้านบนแล้ว
ในที่ที่มีการกระตุ้นด้วยแม่เหล็กไฟฟ้า ขดลวดสามารถเชื่อมต่อกับกระดองได้ทั้งแบบอนุกรมหรือแบบขนาน การเชื่อมต่อแบบอนุกรมปลอดภัยเพราะ วงจรไฟฟ้าการไหลทั่วไป กระแสไฟฟ้า- การแตกหรือการเชื่อมต่อกับแหล่งพลังงานทำให้เกิดการเปลี่ยนแปลงของกระแสในขดลวดมอเตอร์พร้อมกัน แต่ด้วยการเชื่อมต่อแบบขนาน สถานการณ์ต่างๆ ก็เป็นไปได้
หากเมื่อใช้แรงดันไฟฟ้ากับเครื่องยนต์ สนามที่คดเคี้ยวจะถูกยกเลิกพลังงานและกระดองได้รับพลังงาน สภาวะจะเกิดขึ้นสำหรับปรากฏการณ์ที่เรียกว่าการเคลื่อนตัวของเครื่องยนต์ ในเวลาเดียวกันโรเตอร์ซึ่งพยายามดึงดูดเหล็กสเตเตอร์จะหมุนและเร่งความเร็วเร็วขึ้นและเร็วขึ้น ถ้าโมเมนต์โหลดที่มากกว่าที่โรเตอร์สร้างขึ้นไม่ได้ถูกจ่ายให้กับเพลา ความเร่งสามารถดำเนินต่อไปได้จนกว่าโรเตอร์จะถูกทำลาย เพื่อป้องกันการแพร่กระจาย จำเป็นที่:
- เครื่องยนต์ยังคงมีภาระอย่างน้อยบางส่วน
- มีองค์ประกอบโครงสร้างพิเศษ
- ชุดซอฟต์สตาร์ทได้รับการรับรองเพื่อป้องกันกระบวนการนี้
สตาร์ทมอเตอร์ซิงโครนัสอย่างนุ่มนวล
มอเตอร์ซิงโครนัสที่ทำงานจากเครือข่ายไฟฟ้าที่มีเฟสจำนวนเท่าใดก็ได้จะถูกเร่งความเร็วในลักษณะมอเตอร์อะซิงโครนัส โดยใช้สลิป จากนั้น เมื่อเปลี่ยนโรเตอร์ให้เป็นแม่เหล็กโดยไม่ขึ้นกับสเตเตอร์ ความเร็วในการหมุนของสเตเตอร์และสนามโรเตอร์จะเท่ากัน ด้วยเหตุนี้ ชุดซอฟต์สตาร์ทที่ใช้สำหรับมอเตอร์ซิงโครนัสจึงเหมือนกับมอเตอร์อะซิงโครนัส รายละเอียดที่โดดเด่นบางประการขึ้นอยู่กับแหล่งจ่ายไฟของโรเตอร์สามารถดูเพิ่มเติมได้ในภาพ:

ข้อสรุป
โดยทั่วไป ซอฟต์สตาร์ทเตอร์สำหรับมอเตอร์ไฟฟ้าทุกประเภทจะคล้ายกันและอิงตามวงจรและองค์ประกอบเดียวกัน การเลือกจะต้องเป็นไปตามเงื่อนไขเฉพาะ โดยขึ้นอยู่กับกำลังของเครื่องยนต์เป็นหลัก แต่สวิตช์เซมิคอนดักเตอร์สมัยใหม่ทำให้สามารถให้พารามิเตอร์การสตาร์ทแบบนุ่มนวลที่ดีที่สุดในช่วงกำลังที่กว้างได้ ดังนั้นจึงเหมาะสมที่จะเลือกพวกมันก่อน
ชุดซอฟต์สตาร์ท ABB PSR-25-600
สวัสดีทุกคน! วันนี้จะมีบทความที่แสดงตัวอย่างจริงของการใช้ซอฟต์สตาร์ทเตอร์ในทางปฏิบัติ เริ่มต้นอย่างนุ่มนวลฉันติดตั้งมอเตอร์ไฟฟ้าบนอุปกรณ์จริง มีรูปถ่ายและไดอะแกรมให้
ก่อนหน้านี้ฉันได้อธิบายโดยละเอียดแล้วว่านี่คืออุปกรณ์ประเภทใด ฉันเตือนคุณว่า ซอฟต์สตาร์ทเตอร์และ ซอฟต์สตาร์ทเตอร์โดยพื้นฐานแล้วเป็นอุปกรณ์เดียวกัน ชื่อเหล่านี้นำมาจาก English Soft Starter ในบทความฉันจะเรียกบล็อกนี้ด้วยวิธีนี้และทำความคุ้นเคยกับมัน) มีข้อมูลเพียงพอเกี่ยวกับซอฟต์สตาร์ทเตอร์บนอินเทอร์เน็ต ฉันแนะนำให้อ่านด้วย
ความคิดเห็นของฉันเกี่ยวกับการสตาร์ทมอเตอร์แบบอะซิงโครนัสซึ่งได้รับการยืนยันจากการสังเกตและการปฏิบัติเป็นเวลาหลายปี สำหรับกำลังของเครื่องยนต์ที่สูงกว่า 4 kW ควรพิจารณาเพื่อให้แน่ใจว่าเครื่องยนต์เร่งความเร็วได้อย่างราบรื่น นี่เป็นสิ่งจำเป็นสำหรับภาระแรงเฉื่อยที่หนักหน่วงซึ่งเป็นสิ่งที่เชื่อมต่อกับเพลาของมอเตอร์อย่างแม่นยำ หากใช้เครื่องยนต์ร่วมกับกระปุกเกียร์สถานการณ์ก็จะง่ายขึ้น
ที่ง่ายที่สุดและมากที่สุด ตัวเลือกราคาถูกสตาร์ทแบบนุ่มนวล - ตัวเลือกพร้อมสวิตช์เครื่องยนต์ผ่านวงจร "Star-Delta" ตัวเลือกที่ "ราบรื่น" และยืดหยุ่นมากขึ้นคือซอฟต์สตาร์ทและตัวแปลงความถี่ (รู้จักกันทั่วไปในชื่อ "ตัวขับความถี่") นอกจากนี้ยังมีวิธีโบราณที่แทบไม่เคยใช้เลย -.
อนึ่ง, ลงชื่อแน่นอนความจริงที่ว่าเครื่องยนต์ขับเคลื่อนผ่านตัวแปลงความถี่ - เสียงแหลมที่ได้ยินได้ชัดเจนด้วยความถี่ประมาณ 8 kHz โดยเฉพาะที่ความเร็วต่ำ
ฉันได้ใช้ซอฟต์สตาร์ทเตอร์จาก Schneider Electric แล้ว มันเป็นประสบการณ์ที่ดีในการทำงานของฉัน จากนั้นจึงจำเป็นต้องเปิด/ปิดสายพานลำเลียงแบบวงกลมยาวพร้อมชิ้นงานอย่างราบรื่น (มอเตอร์ 2.2 kW พร้อมกระปุกเกียร์) น่าเสียดายที่ตอนนั้นฉันไม่มีกล้องอยู่ในมือ แต่คราวนี้เราจะดูรายละเอียดทั้งหมดอย่างละเอียด!
เหตุใดจึงจำเป็นต้องสตาร์ทเครื่องยนต์อย่างนุ่มนวล?
ดังนั้นปัญหาคือห้องหม้อไอน้ำมีปั๊มสำหรับป้อนน้ำให้กับหม้อไอน้ำ มีปั๊มเพียงสองตัวเท่านั้นและเปิดทำงานตามคำสั่งจากระบบเพื่อตรวจสอบระดับน้ำในหม้อไอน้ำ ปั๊มสามารถทำงานได้ครั้งละหนึ่งปั๊มเท่านั้น ผู้ควบคุมห้องหม้อไอน้ำจะเลือกปั๊มโดยการเปลี่ยนก๊อกน้ำและสวิตช์ไฟฟ้า
ปั๊มขับเคลื่อนด้วยมอเตอร์อะซิงโครนัสทั่วไป มอเตอร์อะซิงโครนัส 7.5 kW ผ่านคอนแทคเตอร์ทั่วไป () และเนื่องจากกำลังสูง การสตาร์ทเครื่องจึงทำได้ยากมาก ทุกครั้งที่เริ่มจะมีค้อนน้ำที่เห็นได้ชัดเจน ตัวเครื่องยนต์เอง ปั๊ม และระบบไฮดรอลิกเสื่อมสภาพ บางครั้งรู้สึกเหมือนท่อและก๊อกกำลังจะแตกเป็นชิ้นๆ
นอกจากนี้เมื่อหม้อต้มเย็นลงและจ่ายไฟกะทันหัน น้ำร้อน(ตามที่เทคโนโลยีต้องการ อุณหภูมิประมาณ 95 °C) จากนั้นปรากฏการณ์อันไม่พึงประสงค์ก็เกิดขึ้น ชวนให้นึกถึงการเดือดของระเบิด
มีหม้อไอน้ำที่เหมือนกันสองตัวในห้องหม้อไอน้ำ แต่อันที่สองมีตัวแปลงความถี่สำหรับปั๊ม หม้อไอน้ำ (หรือที่เรียกให้เจาะจงกว่าคือเครื่องกำเนิดไอน้ำ) ผลิตไอน้ำที่มีอุณหภูมิมากกว่า 115 ° C และความดันสูงถึง 14 kgf/cm2
เป็นเรื่องน่าเสียดายที่การออกแบบหม้อไอน้ำในวงจรไฟฟ้าไม่ได้ช่วยให้มอเตอร์ปั๊มทำงานได้อย่างราบรื่น แม้ว่าหม้อไอน้ำจะเป็นของอิตาลี แต่ก็มีการตัดสินใจที่จะประหยัดเงินในเรื่องนี้...
ฉันขอย้ำอีกครั้งว่าเพื่อให้เปิดมอเตอร์อะซิงโครนัสได้อย่างราบรื่นเรามีตัวเลือกต่อไปนี้ให้เลือก:
- วงจรสตาร์-เดลต้า
- ระบบสตาร์ทนุ่มนวล (soft start)
- ตัวแปลงความถี่ (อินเวอร์เตอร์)
ใน ในกรณีนี้จำเป็นต้องเลือกตัวเลือกที่ต้องการการรบกวนน้อยที่สุดในวงจรควบคุมการทำงานของหม้อไอน้ำ
ความจริงก็คือการเปลี่ยนแปลงใด ๆ ในการทำงานของหม้อไอน้ำจะต้องได้รับการตกลงกับผู้ผลิตหม้อไอน้ำ (หรือองค์กรที่ได้รับการรับรอง) และกับองค์กรกำกับดูแล ดังนั้นการเปลี่ยนแปลงจะต้องดำเนินการอย่างเงียบ ๆ และไม่มีเสียงรบกวนที่ไม่จำเป็น แม้ว่าฉันจะไม่ยุ่งเกี่ยวกับระบบรักษาความปลอดภัย ดังนั้นที่นี่จึงไม่เข้มงวดนัก
ผู้อ่านประจำของฉันรู้ว่าตอนนี้หลังจาก ฉันมีสิทธิ์ทุกประการที่จะทำงานด้านเครื่องมือวัดและระบบอัตโนมัติในห้องหม้อไอน้ำ
การเลือกซอฟต์สตาร์ทเตอร์
ก่อนอื่น มาดูป้ายชื่อเครื่องยนต์กันก่อน:

กำลังมอเตอร์ 7.5 kW ขดลวดเชื่อมต่ออยู่ในวงจรเดลต้า กระแสไฟที่ใช้คือ 14.7A
นี่คือลักษณะของระบบการยิง (“ยาก”):

ฉันขอเตือนคุณว่าเรามีเครื่องยนต์สองเครื่องและสตาร์ทด้วยคอนแทคเตอร์ 07KM1 และ 07KM2 คอนแทคเตอร์มีการติดตั้งบล็อกของหน้าสัมผัสเพิ่มเติมเพื่อบ่งชี้และควบคุมการเปิดเครื่อง
อีกทางเลือกหนึ่งคือเลือกซอฟต์สตาร์ทเตอร์ ABB PSR-25-600 กระแสสูงสุดคือ 25 แอมป์ ดังนั้นเราจึงมีกำลังสำรองที่ดี โดยเฉพาะอย่างยิ่งเมื่อคุณพิจารณาว่าคุณจะต้องทำงานในสภาวะที่ยากลำบาก - จำนวนครั้งในการเริ่ม/หยุด อุณหภูมิสูง- รูปภาพอยู่ที่จุดเริ่มต้นของบทความ
นี่คือสติกเกอร์บน softstarter พร้อมพารามิเตอร์:
มีอะไรใหม่ในกลุ่ม VK? SamElectric.ru ?
สมัครสมาชิกและอ่านบทความเพิ่มเติม:

ชุดซอฟต์สตาร์ท ABB PSR-25-600 – พารามิเตอร์
- FLA - แอมป์โหลดเต็ม - ค่าปัจจุบันที่โหลดเต็ม - เกือบ 25A,
- Uc - แรงดันไฟฟ้าปฏิบัติการ
- เรา - ควบคุมแรงดันไฟฟ้าของวงจร
การติดตั้งซอฟต์สตาร์ทเตอร์
ฉันลองมันเพื่อเริ่มต้น:

ความสูงเท่าเดิม ความกว้างเท่าเดิม เพียงยาวกว่านิดหน่อยแต่ก็ยังมีที่ว่าง
ตอนนี้คำถามเกี่ยวกับวงจรควบคุม คอนแทคเตอร์ในวงจรเดิมเปิดอยู่ด้วยแรงดันไฟฟ้า 24 VAC และ ABB ของเราถูกควบคุมด้วยแรงดันไฟฟ้าอย่างน้อย 100 VAC ไม่จำเป็นต้องมีรีเลย์กลางหรือการเปลี่ยนแปลงแรงดันไฟฟ้าของวงจรควบคุม
อย่างไรก็ตาม บนเว็บไซต์ ABB อย่างเป็นทางการ ฉันพบแผนภาพที่แสดงว่าอุปกรณ์นี้สามารถทำงานได้ที่ 24 VAC เช่นกัน ฉันลองเสี่ยงโชคแล้ว - มันใช้งานไม่ได้ มันจะไม่เริ่ม...
เราติดตั้งรีเลย์กลางที่นำแรงดันไฟฟ้าไปสู่ระดับที่ต้องการ:

นี่คือจากอีกมุมหนึ่ง:

แค่นั้นแหละ. รีเลย์กลางเรียกว่า 07KM11 และ 07KM21 โดยวิธีการเหล่านี้ยังจำเป็นสำหรับวงจรเพิ่มเติมด้วย ตัวบ่งชี้และหน้าสัมผัสแบบแห้งสำหรับอุปกรณ์ภายนอกจะเปิดอยู่ (ยังไม่ได้ใช้ในวงจรเก่า - สายสีส้ม)
เมื่อฉันต้องการใช้การควบคุมโดยตรงโดยไม่ต้องใช้รีเลย์ (24 VAC) ฉันวางแผนที่จะเปิดไฟแสดงสถานะพลังงานผ่านหน้าสัมผัส Com – Run ซึ่งตอนนี้ไม่ได้ใช้งานแล้ว
วงจรสตาร์ทแบบนุ่มนวล
นี่คือแผนภาพต้นฉบับ
ต่อไปนี้คือวิธีที่ฉันสามารถเปลี่ยนแปลงไดอะแกรมได้อย่างง่ายดาย:

เกี่ยวกับการตั้งค่า - สั้น ๆ มีการปรับเปลี่ยนสามแบบ ได้แก่ เวลาเร่งความเร็ว เวลาลดความเร็ว และแรงดันไฟฟ้าเริ่มต้น
อาจเป็นไปได้ที่จะใช้ชุดซอฟต์สตาร์ทหนึ่งตัวและคอนแทคเตอร์เลือกมอเตอร์ (สลับอุปกรณ์หนึ่งเป็นมอเตอร์สองตัว) แต่สิ่งนี้จะทำให้วงจรซับซ้อนและเปลี่ยนแปลงอย่างมาก และลดความน่าเชื่อถือ ซึ่งมีความสำคัญมากสำหรับสิ่งอำนวยความสะดวกเชิงกลยุทธ์เช่นโรงต้มน้ำ
รูปคลื่นแรงดันไฟฟ้า
ถั่วแห่งความรู้นั้นยาก แต่ก็ยังคงอยู่
เราไม่คุ้นเคยกับการล่าถอย!
มันจะช่วยให้เราแยกแยะได้
ข่าวประชาสัมพันธ์ “ฉันอยากรู้ทุกอย่าง!”
ใครๆ ก็สามารถประกอบวงจรด้วยไขควงได้ และสำหรับผู้ที่ต้องการดูแรงดันไฟฟ้าและทำความเข้าใจว่ากระบวนการจริงกำลังเกิดขึ้น พวกเขาจะขาดออสซิลโลสโคปไม่ได้ ฉันกำลังเผยแพร่ออสซิลโลแกรมที่เอาต์พุต 2T1 ของซอฟต์สตาร์ทเตอร์

มันไม่สอดคล้องกันเชิงตรรกะ - เครื่องยนต์ดับ แต่มีแรงดันไฟฟ้าอยู่! นี่คือคุณลักษณะของซอฟต์สตาร์ทเตอร์บางตัว ไม่พึงประสงค์และอันตราย ใช่ เครื่องยนต์มีแรงดันไฟฟ้า 220 โวลต์ แม้ว่าจะดับแล้วก็ตาม
ความจริงก็คือการควบคุมเกิดขึ้นในสองเฟสเท่านั้นและส่วนที่สาม (L3 - T3) เชื่อมต่อโดยตรงกับมอเตอร์ และเนื่องจากไม่มีกระแสไฟฟ้า เอาต์พุตทั้งหมดของอุปกรณ์จึงได้รับผลกระทบจากแรงดันไฟฟ้าเฟส L3 ซึ่งไหลผ่านขดลวดมอเตอร์ เรื่องไร้สาระเดียวกันนี้เกิดขึ้นในรีเลย์โซลิดสเตตสามเฟส
ระวัง!เมื่อซ่อมบำรุงมอเตอร์ที่เชื่อมต่อกับชุดซอฟต์สตาร์ท ให้ปิดเบรกเกอร์วงจรอินพุตและตรวจสอบว่าไม่มีแรงดันไฟฟ้า!

เนื่องจากโหลดเป็นแบบอุปนัย คลื่นไซน์จึงไม่เพียงแต่ถูกตัดเป็นชิ้น ๆ เท่านั้น แต่ยังบิดเบี้ยวอย่างมากอีกด้วย
มีการรบกวนและต้องคำนึงถึงสิ่งนี้ - อาจเกิดความผิดปกติในการทำงานของตัวควบคุมและกระแสไฟฟ้าอ่อนอื่น ๆ ได้ เพื่อลดผลกระทบนี้ จำเป็นต้องเว้นระยะห่างและป้องกันวงจร ติดตั้งโช้กที่อินพุต ฯลฯ

ภาพถ่ายถูกถ่ายสองสามวินาทีก่อนที่จะเปิดคอนแทคเตอร์ภายใน (บายพาส) ซึ่งจ่ายแรงดันไฟฟ้าเต็มให้กับมอเตอร์
รูปถ่ายของคดี
โบนัสเล็ก ๆ อีกอัน - รูปถ่ายไม่กี่รูป รูปร่างซอฟต์สตาร์ทเตอร์ ABB PSR-25-600

ABB PSR-25-600 – มุมมองด้านล่าง

ตัวเลือก – ขั้วต่อและตัวยึดสำหรับเชื่อมต่อพัดลมระบายความร้อนในกรณีที่มีภาระหนัก

ABB PSR-25-600 – ขั้วต่ออินพุตกำลังไฟและขั้วต่อจ่ายไฟและส่วนควบคุม

เพียงเท่านี้ ยินดีต้อนรับคำถามและคำวิจารณ์ในความคิดเห็นเกี่ยวกับการสตาร์ทมอเตอร์ไฟฟ้าอย่างนุ่มนวล!
สุขสันต์วันหยุดเดือนพฤษภาคม!
มอเตอร์ไฟฟ้าถูกนำมาใช้กันอย่างแพร่หลายในทุกด้านของกิจกรรมของมนุษย์ อย่างไรก็ตามเมื่อสตาร์ทมอเตอร์ไฟฟ้าจะมีการสิ้นเปลืองกระแสไฟถึงเจ็ดเท่าซึ่งไม่เพียงทำให้เครือข่ายแหล่งจ่ายไฟโอเวอร์โหลดเท่านั้น แต่ยังทำให้ขดลวดสเตเตอร์ร้อนขึ้นรวมถึงความล้มเหลวของชิ้นส่วนทางกลด้วย เพื่อกำจัดผลกระทบที่ไม่พึงประสงค์นี้ นักวิทยุสมัครเล่นแนะนำให้ใช้ซอฟต์สตาร์ทเตอร์สำหรับมอเตอร์ไฟฟ้า
สตาร์ทเครื่องยนต์ได้อย่างราบรื่น
สเตเตอร์ของมอเตอร์ไฟฟ้าเป็นขดลวดเหนี่ยวนำ ดังนั้นจึงมีส่วนประกอบของความต้านทาน (R) แบบแอคทีฟและปฏิกิริยา ค่าของส่วนประกอบที่เกิดปฏิกิริยาขึ้นอยู่กับลักษณะความถี่ของแหล่งจ่ายไฟและระหว่างช่วงเริ่มต้นตั้งแต่ 0 ถึงค่าที่คำนวณได้ (ระหว่างการทำงานของเครื่องมือ) นอกจากนี้ปัจจุบันเรียกว่าการเปลี่ยนแปลงปัจจุบันเริ่มต้น
กระแสเริ่มต้นคือ 7 เท่าของค่าพิกัด ในระหว่างกระบวนการนี้ ขดลวดของขดลวดสเตเตอร์จะร้อนขึ้น และหากลวดที่ประกอบเป็นขดลวดเก่า อาจเกิดการลัดวงจรระหว่างกัน (เมื่อค่า R ลดลง กระแสไฟฟ้าจะถึงค่าสูงสุด) ความร้อนสูงเกินไปทำให้อายุการใช้งานของเครื่องมือลดลง เพื่อป้องกันปัญหานี้ มีหลายตัวเลือกสำหรับการใช้ซอฟต์สตาร์ทเตอร์
ด้วยการสลับขดลวด อุปกรณ์สตาร์ทมอเตอร์แบบนุ่มนวล (USP) ประกอบด้วยส่วนประกอบหลักดังต่อไปนี้: รีเลย์ 2 ประเภท (การควบคุมเวลาและโหลด) คอนแทคเตอร์สามตัว (รูปที่ 1)
รูปที่ 1 - โครงการทั่วไปอุปกรณ์สำหรับการสตาร์ทมอเตอร์แบบอะซิงโครนัสอย่างราบรื่น (สตาร์ทแบบนุ่มนวล)
รูปที่ 1 แสดงมอเตอร์แบบอะซิงโครนัส ขดลวดของมันเชื่อมต่อกันโดยใช้ประเภทการเชื่อมต่อแบบดาว การสตาร์ทจะดำเนินการโดยใช้คอนแทคเตอร์แบบปิด K1 และ K3 หลังจากช่วงเวลาหนึ่ง (ตั้งค่าโดยใช้รีเลย์เวลา) คอนแทคเตอร์ K3 จะเปิดหน้าสัมผัส (ปิดเครื่อง) และหน้าสัมผัส K2 จะเปิดขึ้น แผนภาพในรูปที่ 1 ยังใช้ได้กับมอเตอร์สตาร์ทแบบซอฟต์สตาร์ทประเภทต่างๆ อีกด้วย
ข้อเสียเปรียบหลักคือการก่อตัวของกระแสไฟฟ้าลัดวงจรเมื่อเปิดเบรกเกอร์ 2 ตัวพร้อมกัน ปัญหานี้แก้ไขได้โดยการใส่สวิตช์เข้าไปในวงจรแทนคอนแทคเตอร์ อย่างไรก็ตาม ขดลวดสเตเตอร์ยังคงร้อนขึ้นต่อไป
เมื่อควบคุมความถี่สตาร์ทของมอเตอร์ไฟฟ้าด้วยระบบอิเล็กทรอนิกส์ จะใช้หลักการแปรผันความถี่ของแรงดันไฟฟ้า องค์ประกอบหลักของตัวแปลงเหล่านี้คือ ตัวแปลงความถี่รวมถึง:
- วงจรเรียงกระแสถูกประกอบบนไดโอดเซมิคอนดักเตอร์ที่ทรงพลัง (สามารถใช้รุ่นไทริสเตอร์ได้) มันจะแปลงแรงดันไฟหลักเป็นกระแสตรงแบบเร้าใจ
- วงจรระดับกลางช่วยลดการรบกวนและการกระเพื่อมให้ราบรื่น
- จำเป็นต้องใช้อินเวอร์เตอร์ในการแปลงสัญญาณที่ได้รับที่เอาต์พุตของวงจรระดับกลางให้เป็นสัญญาณที่มีคุณสมบัติแอมพลิจูดและความถี่ที่แปรผันได้
- วงจรควบคุมอิเล็กทรอนิกส์จะสร้างสัญญาณสำหรับส่วนประกอบทั้งหมดของคอนเวอร์เตอร์
หลักการทำงาน ประเภท และทางเลือก
เมื่อเพิ่มแรงบิดของโรเตอร์และ IP 7 เท่า เพื่อยืดอายุการใช้งานจำเป็นต้องใช้ซอฟต์สตาร์ทเตอร์ซึ่ง ตรงตามข้อกำหนดต่อไปนี้:
- เพิ่มขึ้นสม่ำเสมอและราบรื่นในทุกตัวชี้วัด
- การควบคุมการเบรกด้วยไฟฟ้าและการสตาร์ทเครื่องยนต์ตามช่วงเวลาที่กำหนด
- ป้องกันไฟกระชาก การสูญเสียเฟสใดๆ (สำหรับมอเตอร์ไฟฟ้า 3 เฟส) และการรบกวนประเภทต่างๆ
- เพิ่มความต้านทานการสึกหรอ
หลักการทำงานของ Triac Soft Starter: จำกัด ค่าแรงดันไฟฟ้าโดยการเปลี่ยนมุมเปิดของเซมิคอนดักเตอร์ Triac (Triacs) เมื่อเชื่อมต่อกับขดลวดสเตเตอร์ของมอเตอร์ไฟฟ้า (รูปที่ 2)
รูปที่ 2 - โครงการสตาร์ทมอเตอร์ไฟฟ้าอย่างนุ่มนวลโดยใช้ไทรแอก
ด้วยการใช้ triac ทำให้สามารถลดกระแสไหลเข้าได้ 2 เท่าขึ้นไป และการมีอยู่ของคอนแทคเตอร์ช่วยให้คุณหลีกเลี่ยงความร้อนสูงเกินไปของ triacs (ในรูปที่ 2: บายพาส) ข้อเสียเปรียบหลักของ Triac Soft Starter:
- แอปพลิเคชัน วงจรง่ายๆเป็นไปได้เฉพาะเมื่อบรรทุกน้ำหนักเบาหรือสตาร์ทไม่ได้ใช้งานเท่านั้น มิฉะนั้นโครงการจะซับซ้อนมากขึ้น
- ขดลวดและอุปกรณ์เซมิคอนดักเตอร์ร้อนเกินไปเกิดขึ้นในระหว่างการสตาร์ทเครื่องเป็นเวลานาน
- บางครั้งเครื่องยนต์ไม่สตาร์ท (ส่งผลให้ขดลวดเกิดความร้อนสูงเกินไป)
- เมื่อมอเตอร์ไฟฟ้าถูกเบรก ขดลวดอาจมีความร้อนมากเกินไป
มีการใช้ซอฟต์สตาร์ทเตอร์ที่มีตัวควบคุมซึ่งไม่มีการป้อนกลับ (1 หรือ 3 เฟส) กันอย่างแพร่หลาย ในรุ่นประเภทนี้จำเป็นต้องตั้งเวลาสตาร์ทและแรงดันไฟฟ้าของมอเตอร์ไฟฟ้าทันทีก่อนสตาร์ท ข้อเสียของอุปกรณ์คือการไม่สามารถควบคุมแรงบิดของชิ้นส่วนเครื่องจักรกลที่เคลื่อนที่ตามภาระได้ เพื่อขจัดปัญหานี้ คุณต้องใช้อุปกรณ์เพื่อลด Ip ป้องกันความแตกต่างของเฟสต่างๆ (เกิดขึ้นระหว่างเฟสไม่สมดุล) และโอเวอร์โหลดทางกล
รุ่นซอฟต์สตาร์ทเตอร์ที่มีราคาแพงกว่านั้นรวมถึงความสามารถในการตรวจสอบพารามิเตอร์การทำงานของมอเตอร์ไฟฟ้าในโหมดต่อเนื่อง
อุปกรณ์ที่มีมอเตอร์ไฟฟ้าติดตั้งซอฟต์สตาร์ทเตอร์โดยใช้ไทรแอก พวกเขาแตกต่างกันในวงจรและวิธีการควบคุมแรงดันไฟหลัก วงจรที่ง่ายที่สุดคือวงจรที่มีการควบคุมเฟสเดียว พวกมันดำเนินการกับ triac เดียวและช่วยให้คุณลดภาระของชิ้นส่วนทางกลลงและใช้สำหรับมอเตอร์ไฟฟ้าที่มีกำลังน้อยกว่า 12 kV องค์กรต่างๆใช้การควบคุมแรงดันไฟฟ้าแบบ 3 เฟสสำหรับมอเตอร์ไฟฟ้าที่มีกำลังสูงถึง 260 กิโลวัตต์ เมื่อเลือกประเภทของซอฟต์สตาร์ทเตอร์ คุณต้องได้รับคำแนะนำจากพารามิเตอร์ต่อไปนี้:
- พลังงานของอุปกรณ์
- โหมดการทำงาน
- ความเท่าเทียมกันของ Ip ของมอเตอร์และซอฟต์สตาร์ท
- จำนวนการเริ่มต้นในช่วงเวลาหนึ่ง
เพื่อปกป้องปั๊ม ซอฟต์สตาร์ทเตอร์จึงเหมาะสมที่จะป้องกันการกระแทกจากส่วนประกอบไฮดรอลิกของท่อ (การควบคุมขั้นสูง) ซอฟต์สตาร์ทเตอร์สำหรับเครื่องมือถูกเลือกตามโหลดและความเร็วสูง ในรุ่นราคาแพงมีการป้องกันประเภทนี้ในรูปแบบของซอฟต์สตาร์ทเตอร์ แต่สำหรับรุ่นราคาประหยัดคุณต้องทำด้วยตัวเอง ใช้ในห้องปฏิบัติการเคมีเพื่อสตาร์ทพัดลมที่ทำให้ของเหลวเย็นลงได้อย่างราบรื่น
เหตุผลในการใช้เครื่องบด
เนื่องจากคุณสมบัติการออกแบบ เมื่อเริ่มต้นเครื่องเจียรมุม ชิ้นส่วนเครื่องมือจะมีแรงไดนามิกสูง ในระหว่างการหมุนดิสก์ครั้งแรก แกนกระปุกเกียร์ขึ้นอยู่กับแรงเฉื่อย:
- การกระตุกแรงเฉื่อยสามารถฉีกเครื่องบดออกจากมือของคุณได้ มีภัยคุกคามต่อชีวิตและสุขภาพเนื่องจากเครื่องมือนี้เป็นอันตรายมากและต้องปฏิบัติตามข้อควรระวังด้านความปลอดภัยอย่างเข้มงวด
- เมื่อสตาร์ท จะเกิดกระแสไฟเกิน (Istart = 7*Inom) แปรงสึกหรอก่อนวัยอันควรและขดลวดเกิดความร้อนสูงเกินไป
- เกียร์ก็เสื่อมสภาพ
- การทำลายของจานตัด
เครื่องดนตรีที่ไม่ได้ปรับแต่งจะกลายเป็นอันตรายมาก เนื่องจากมีความเป็นไปได้ที่จะก่อให้เกิดอันตรายต่อสุขภาพและชีวิต ดังนั้นจึงจำเป็นต้องรักษาความปลอดภัย เพื่อจุดประสงค์นี้ พวกเขาประกอบซอฟต์สตาร์ทเตอร์สำหรับเครื่องมือไฟฟ้าด้วยมือของพวกเขาเอง
การสร้างแบบ DIY
สำหรับเครื่องเจียรลบมุมและเครื่องมืออื่นๆ รุ่นราคาประหยัด คุณต้องประกอบชุดซอฟต์สตาร์ทของคุณเอง การทำเช่นนี้ไม่ใช่เรื่องยากเพราะด้วยอินเทอร์เน็ตคุณจึงสามารถค้นหาแผนการจำนวนมากได้ วิธีที่ง่ายที่สุดและในเวลาเดียวกันก็มีประสิทธิภาพคือวงจรซอฟต์สตาร์ทสากลที่ใช้ไตรแอคและไมโครวงจร
เมื่อคุณเปิดเครื่องเจียรมุมหรือเครื่องมืออื่น ความเสียหายต่อขดลวดและกระปุกเกียร์ของเครื่องมือเกิดจากการสตาร์ทกะทันหัน นักวิทยุสมัครเล่นพบทางออกจากสถานการณ์นี้และเสนอให้เริ่มต้นอย่างนุ่มนวลสำหรับเครื่องมือไฟฟ้าที่ต้องทำด้วยตัวเอง (แผนภาพที่ 1) ซึ่งประกอบในบล็อกแยกต่างหาก (ในกรณีนี้มีพื้นที่น้อยมาก)
จำนวนโครงการที่ 1 - โครงการสำหรับการสตาร์ทเครื่องมือไฟฟ้าอย่างนุ่มนวล
ซอฟต์สตาร์ทเตอร์นั้นถูกใช้งานด้วยมือของคุณเองโดยใช้ KR118PM1 (การควบคุมเฟส) และชุดจ่ายไฟที่ใช้ไทรแอก จุดเด่นหลักของอุปกรณ์คือความสามารถรอบด้านเนื่องจากสามารถเชื่อมต่อกับเครื่องมือไฟฟ้าใดก็ได้ ไม่เพียงแต่ติดตั้งง่ายเท่านั้น แต่ยังไม่ต้องการการกำหนดค่าเบื้องต้นอีกด้วย โดยพื้นฐานแล้วการเชื่อมต่อระบบเข้ากับตัวเครื่องนั้นไม่ซับซ้อนและติดตั้งไว้ที่ส่วนขาดของสายไฟ
คุณลักษณะของโมดูลชุดซอฟต์สตาร์ท
เมื่อเปิดเครื่องบด แรงดันไฟฟ้าจะถูกส่งไปยัง KR118PM1 และแรงดันไฟฟ้าจะเพิ่มขึ้นอย่างราบรื่นที่ตัวเก็บประจุควบคุม (C2) เมื่อประจุเพิ่มขึ้น ไทริสเตอร์ที่อยู่ในไมโครเซอร์กิตจะเปิดออกช้าๆ โดยมีความล่าช้าเล็กน้อย ไทรแอกจะเปิดขึ้นโดยมีการหยุดชั่วคราวเท่ากับการหน่วงเวลาของไทริสเตอร์ ในแต่ละช่วงแรงดันไฟฟ้าที่ตามมา การหน่วงเวลาจะค่อยๆ ลดลง และเครื่องมือเริ่มทำงานได้อย่างราบรื่น
เวลาในการรับการปฏิวัติขึ้นอยู่กับความจุ C2 (ที่ 47 ไมครอน เวลาเริ่มต้นคือ 2 วินาที) การหน่วงเวลานี้เหมาะสมที่สุด แม้ว่าจะสามารถเปลี่ยนแปลงได้โดยการเพิ่มความจุ C2 หลังจากปิดเครื่องบดมุม ตัวเก็บประจุ C2 จะถูกคายประจุด้วยตัวต้านทาน R1 (เวลาคายประจุประมาณ 3 วินาทีที่ 68k)
วงจรสำหรับปรับความเร็วของมอเตอร์ไฟฟ้านี้สามารถอัพเกรดได้โดยการแทนที่ R1 ด้วยตัวต้านทานแบบแปรผัน เมื่อค่าความต้านทานของตัวต้านทานปรับค่าเปลี่ยนแปลง กำลังของมอเตอร์ไฟฟ้าจะเปลี่ยนไป ตัวต้านทาน R2 ทำหน้าที่ควบคุมปริมาณกระแสที่ไหลผ่านอินพุตของ triac VS1 (แนะนำให้พัดลมระบายความร้อน) ซึ่งเป็นตัวควบคุม ตัวเก็บประจุ C1 และ C3 ทำหน้าที่ปกป้องและควบคุมวงจรไมโคร
ไทรแอกถูกเลือกด้วยคุณลักษณะต่อไปนี้: แรงดันไฟฟ้าตรงสูงสุดคือสูงถึง 400–500 V และกระแสไฟฟ้าขั้นต่ำที่ไหลผ่านการเปลี่ยนต้องมีอย่างน้อย 25 A เมื่อผลิตซอฟต์สตาร์ทเตอร์ตามรูปแบบนี้ พลังงานสำรองสามารถอยู่ในช่วง จาก 2 กิโลวัตต์ถึง 5 กิโลวัตต์
ดังนั้นเพื่อเพิ่มอายุการใช้งานของเครื่องมือและมอเตอร์ จึงจำเป็นต้องสตาร์ทอย่างราบรื่น นี่เป็นเพราะคุณสมบัติการออกแบบของมอเตอร์ไฟฟ้าประเภทอะซิงโครนัสและสับเปลี่ยน เมื่อสตาร์ทเครื่องจะมีการสิ้นเปลืองกระแสไฟอย่างรวดเร็วซึ่งทำให้เกิดการสึกหรอของชิ้นส่วนไฟฟ้าและเครื่องกล การใช้ชุดซอฟต์สตาร์ทช่วยให้คุณสามารถปกป้องเครื่องมือไฟฟ้าของคุณโดยปฏิบัติตามกฎระเบียบด้านความปลอดภัย เมื่ออัพเกรดเครื่องมือคุณสามารถซื้อรุ่นสำเร็จรูปได้รวมทั้งประกอบอุปกรณ์สากลที่เรียบง่ายและเชื่อถือได้ซึ่งไม่เพียงแตกต่างเท่านั้น แต่ยังเหนือกว่าซอฟต์สตาร์ทเตอร์จากโรงงานบางตัวอีกด้วย